
こんにちは、メカ旦那です!
Arduinoを使ってなんか作品を作りたい!できれば生活の役に立つものが良い!
そう思った私は、ルンバのようなお掃除ロボットを作ることにしました。奥さんには若干引かれましたがめげずに作ってみました。実際に走っている様子はこちらです。
市販品には到底かないませんが、それっぽくはできました。できるだけ安く、簡単に作れるよう工夫したので、よかったら参考にしてみて下さい!
システム構成
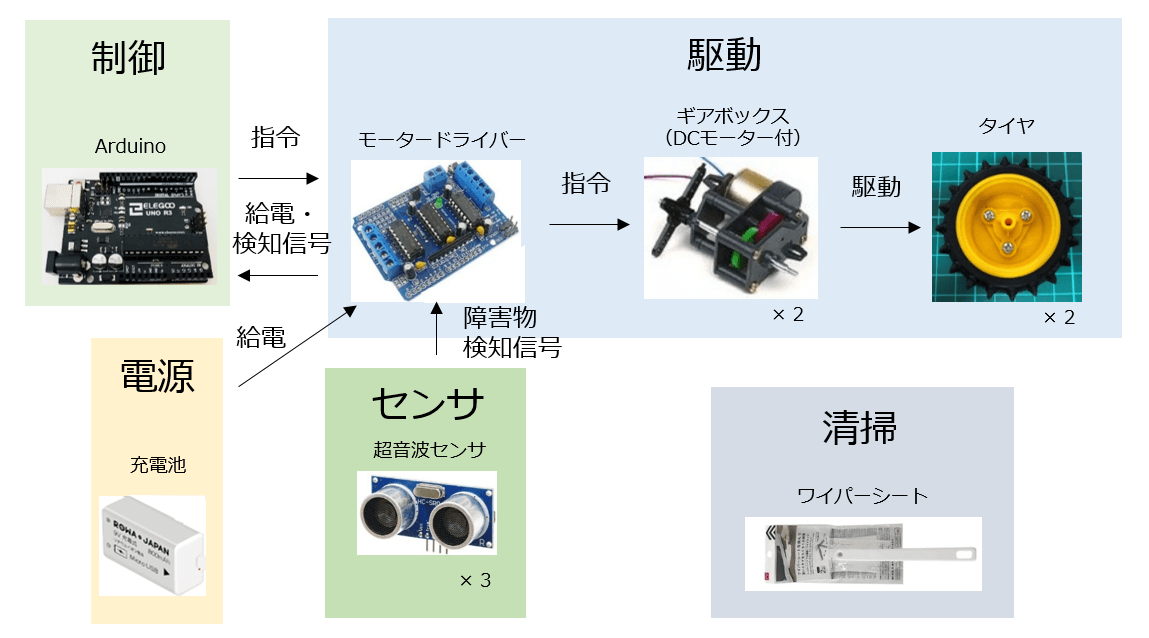
まずは、お掃除ロボのシステム構成についてです。
電源には9V充電池を用います。
制御に関しては、Arduinoからドライバー経由でモーターに指令を送ります。モーターのシャフトが回転し、ギア経由でタイヤに回転を伝達します。今回は、モーター・ギアが一体となったギアボックス(タミヤ製)を使用しました。
また、超音波センサを3つ付けて、障害物検知信号をドライバーを介して、Arduinoに送ります。
本物のお掃除ロボにはジャイロや赤外線など様々なセンサーがついています(参考)。しかし、センサーは高いですし、複雑な回路は作れないので、今回は超音波センサを3つだけ使う事にしました。
清掃については、ワイパーシートを使いました。本当はもう1つモーターをつけて、Arduinoから指令、吸引する仕組みにしたかったのですが、上手くいきませんでした・・・
部材
使うもの
電子部品は上記を使いました。メカ部品は主にダイソーで購入しました。
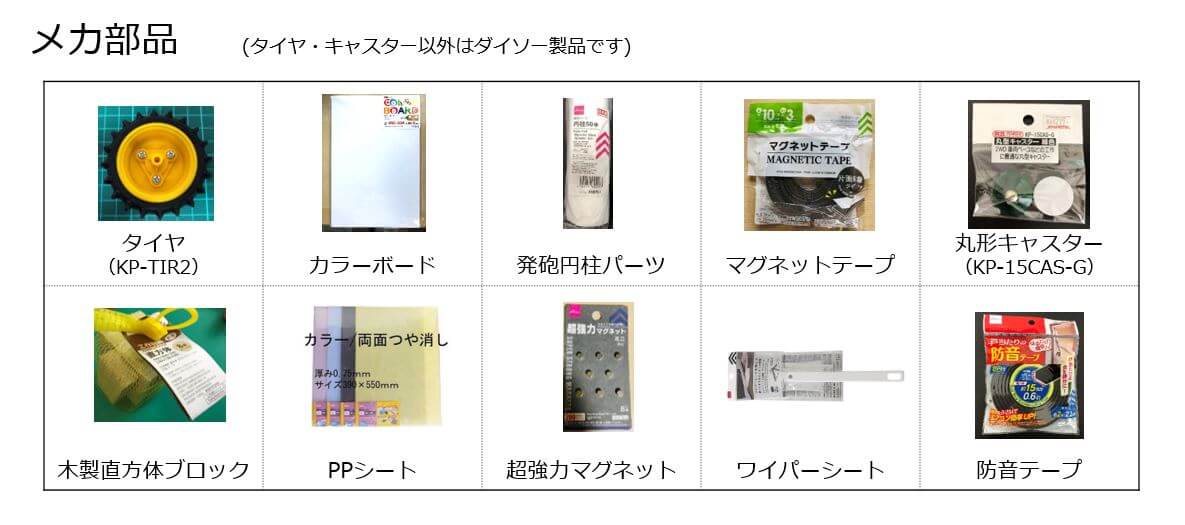
できるだけ安く抑えようと頑張った結果、全部で約12,000円かかりました。意外とかかりましたね。それなら、普通にお掃除ロボット買ったほうが良いのでは・・・とはなりますが、モノづくりを楽しめる方には悪くないのではないでしょうか!
ギヤボックス
まず、タイヤを回すのに必要なギヤボックスを2つ組み立てます。基本的には取説そのままに組み立てます。
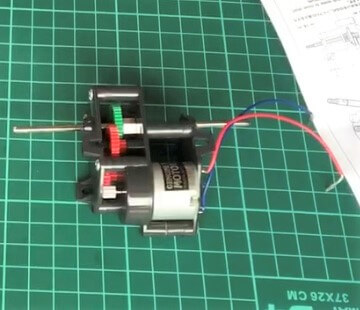
後ほど、モータードライバーの端子台に接続しますが、今のままだと配線がむき出しになっており、接続がしにくい状態です。そこで、QIコネクタを圧着で取り付けます。使うものはこちらです。
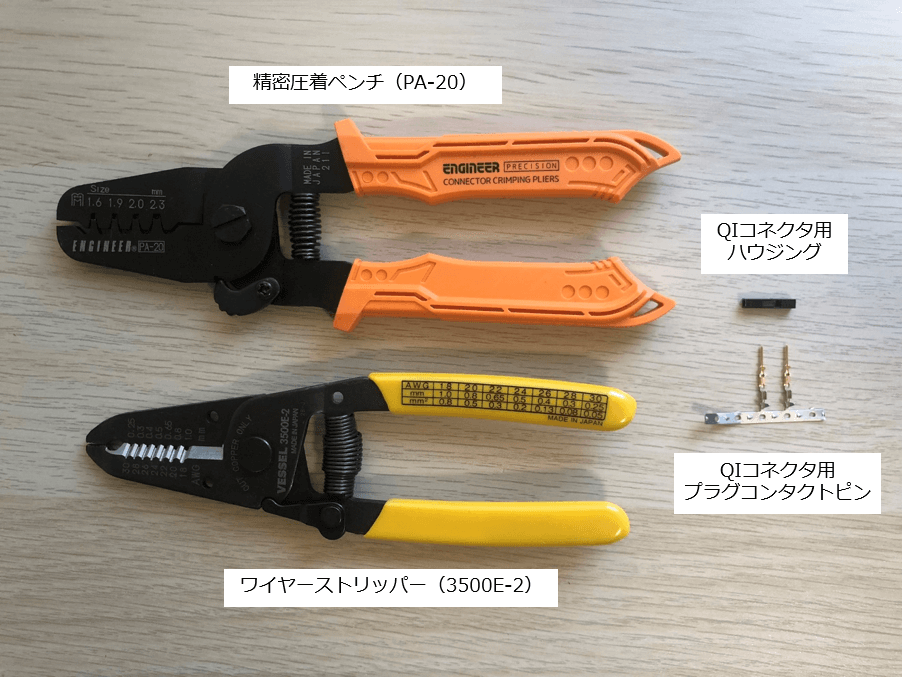
できたものはこちらです。
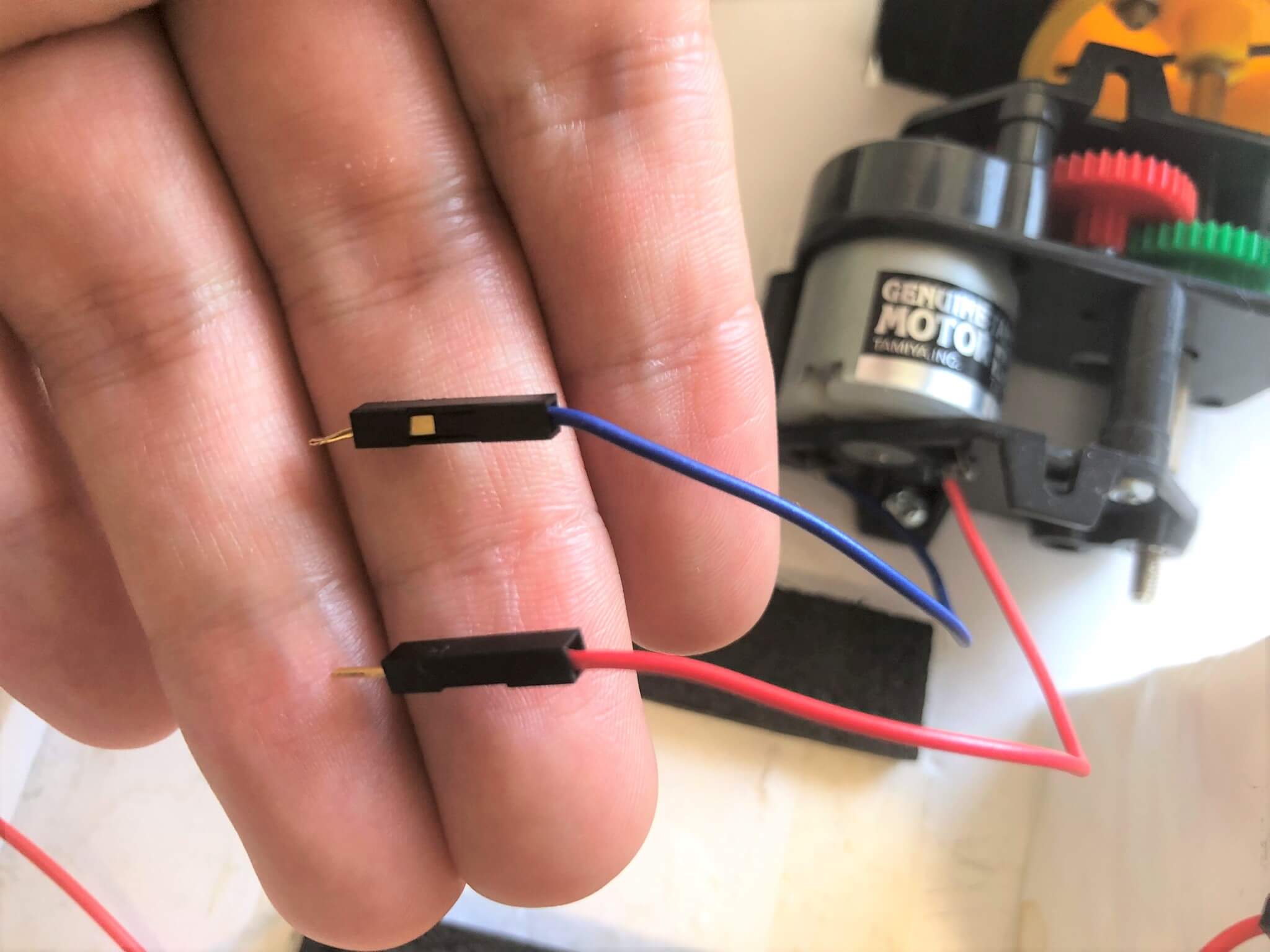
取り付け方法については色々なサイトで解説していますので、そちらを参考にしてみてください。解説のご要望が多ければ記事を作りますので、ぜひ教えてください!
タイヤ
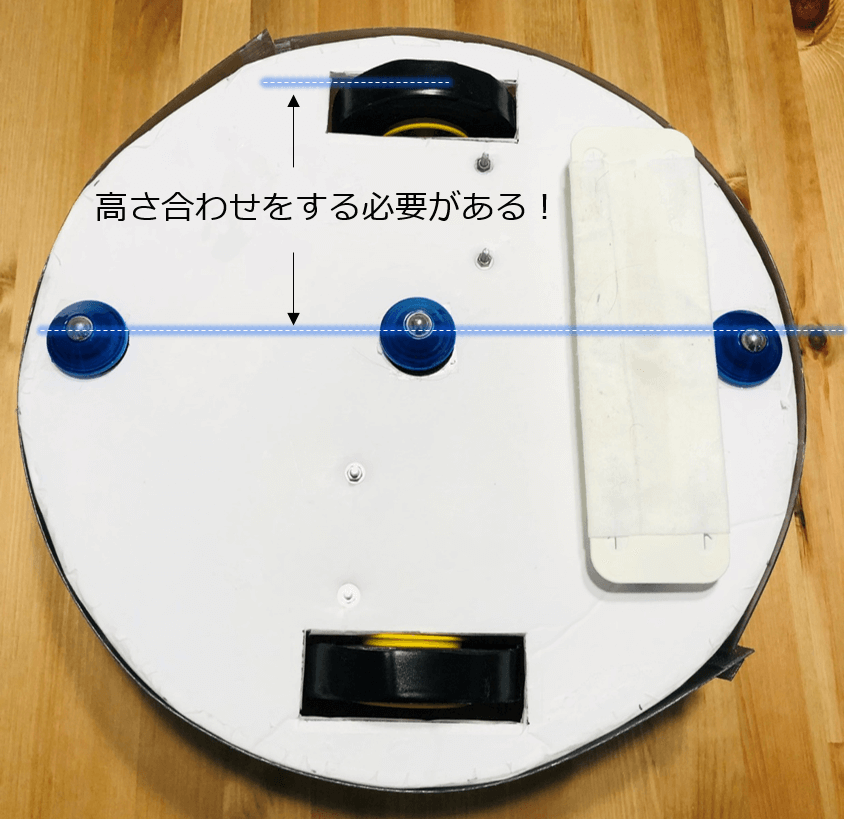
タイヤについてはこちらを使用しましたが、走行補助として取り付けたキャスター×3と高さが合いませんでした。
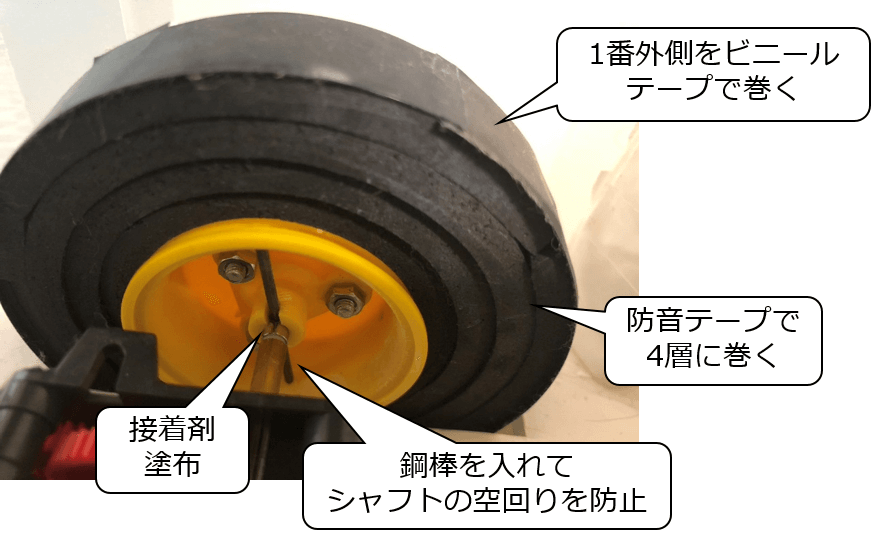
そのためゴム部分を新しく作りました。厚さ5 mmの防音テープを4層、1番外側をビニールテープで巻きました。タイヤが上手く回るよう真円に近い形で丁寧に巻きました。
またホイールについては、穴径が少し大きいのでシャフトが上手くはまりませんでした。そのため、接着剤を入れました。更に適当な長さに切った鋼棒をシャフトの穴に挿して、シャフトが空回りしないようにしました。鋼棒はタミヤの工作キットに入っていた六角レンチをミゼットカッターで切っています。
筐体
筐体はカラーボードを使って作りました。
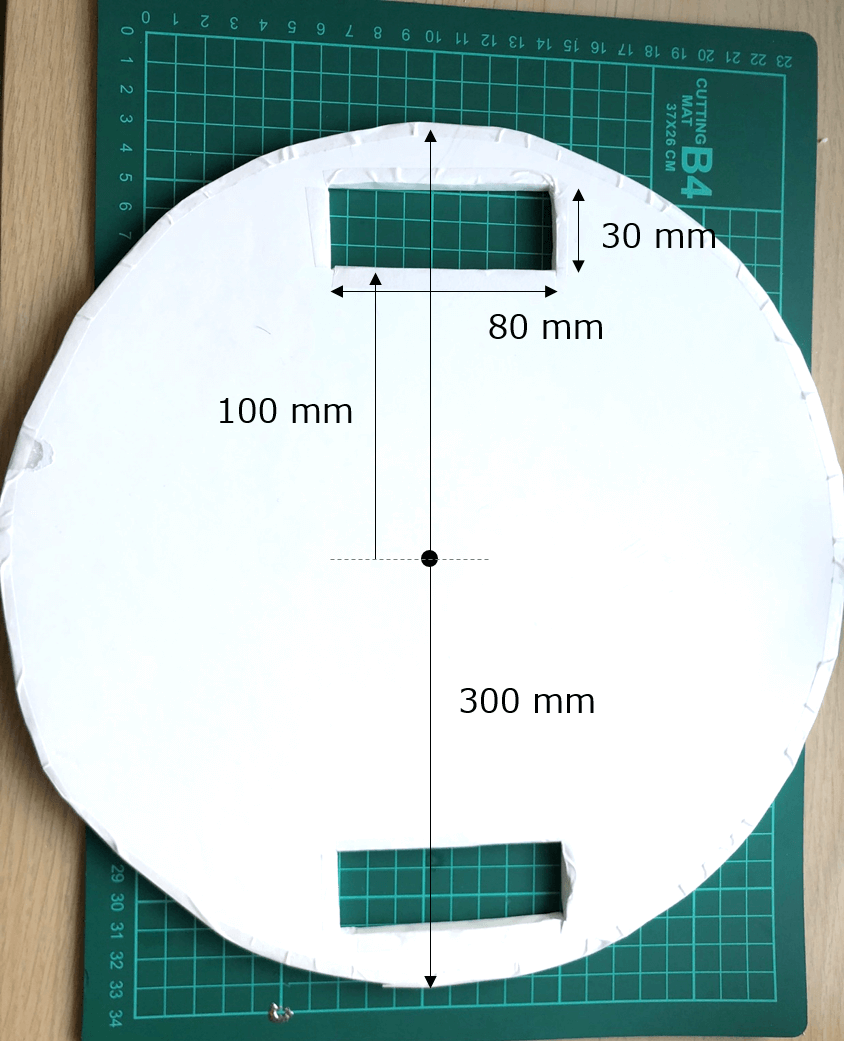
まず、カラーボードを直径300 mmで円形に切ります。タイヤ用の穴ですが、中心からは 100 mm、30 × 80 mm の大きさで2つ作りました。
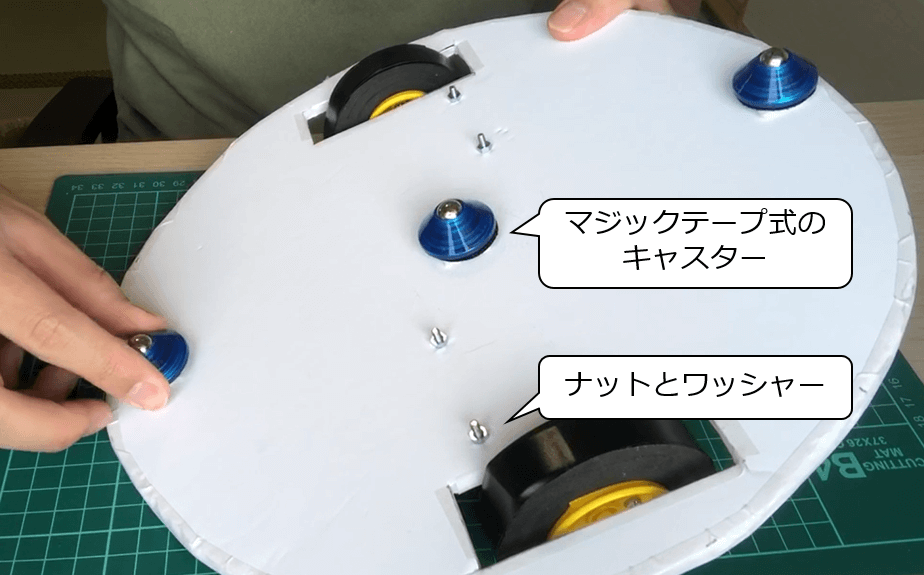
これに先ほど作ったギアボックスをネジで取り付けます。裏はナットとワッシャーで締め付けます。ただ走行中にナットが落ちることがよくあったので、本当は違う固定方法がいいのかもしれません。更に、マジックテープで取り外し可能なキャスターを裏に取り付けます。タイヤと高さが合わない場合は、厚手の両面テープをマジックテープ裏に貼って調整します。
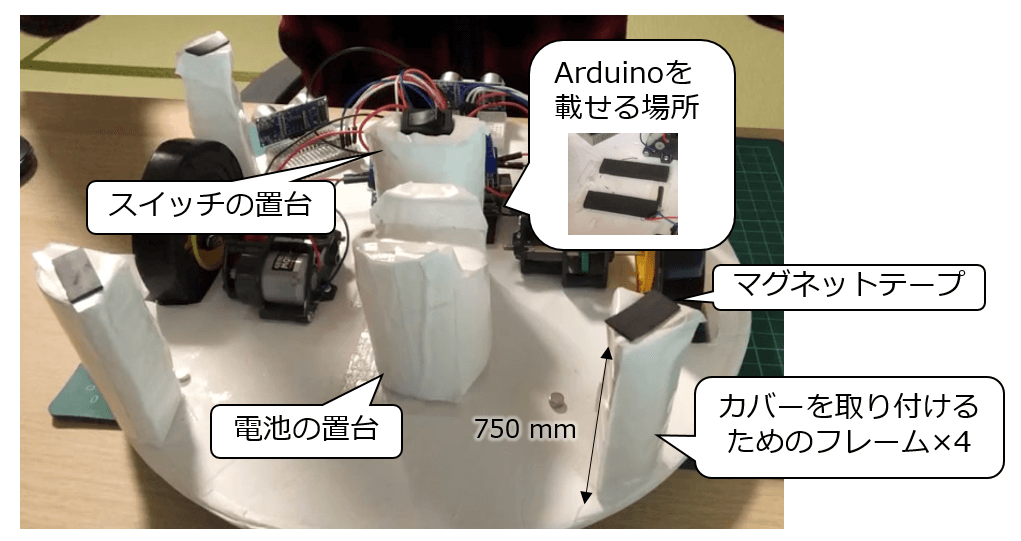
続いてカバーを取り付けるためのフレームですが、長さ750 mm、縦に4等分した発砲パーツで作りました。スイッチ、電池の置台も同じ長さの発砲パーツで作りました。それぞれに、ポロポロ崩れないようテープを巻きつけて、蓋を取り付けるためのマグネットテープを貼りました。また、スイッチ置台の裏に防音テープを2つ貼り、Arduinoを載せる場所を作りました。
ワイパーシート
本当はモーターを使ってゴミを吸引する機構にしたかったのですが、難しかったのでワイパーシートを使いました。
まず、ワイパーシートの取っ手が邪魔なので取り外します。

次に、フレーム裏・ワイパーシートにマグネットを貼り付けます。マグネット同士でくっ付けて完成です。

続きは後編へ
文字数が多くなってきたので、回路図、配線、ソースコードについてはこちらの後編で紹介いたします。ぜひご覧ください!

コメント